



无人机“人巡走山路”到“无人机人工操控”再到“无人机自动巡航”的三级跳,开启了电网巡检“智慧巡线”新征程。以往人工操作无人机,由于作业人员技能水平和判断标准不同,巡视质量和结果会有误差,还存在一定的操作风险。采用无人机自动驾驶巡检后,仅需一名监护人即可完成全部巡视作业,降低了人工成本和作业强度,工作更规范安全,巡视效率大大提升。
电网全自动巡检系统有何优势?
1. 无人机化值守,减少人员用工、通勤成本。
2. 随时作业,减少安全事故。
3. 占地面积小,灵活部署。
4. 拍摄精准、效率高、缺陷报告一键导出。
5.全天候作业:多旋翼无人机大多为电池供电,电池续航限制了无人机的飞行距离、信号的强弱也限制了无人机的通讯距离。无人机机库则能够对无人机进行自动更换电,并进行联网控制,实现无人机的全天候的自动化作业。
电网全自动巡检系统巡检流程介绍:
1. 数据采集:对作业区域进行三维数据采集建模。
2. 航线规划:手动标识飞行航线。
3. 自动飞行:对规划好的航线进行沿线自动飞行。
4. 自动拍摄:边缘计算识别、拍摄点模型对比拍照。
5. 巡检数据处理:图像智能数据处理。

全自动化无人机巡检系统部署在作业区域内,在划定好指定航线后,自动无人机系统即可完成无人机自动起降、图像采集、更换电池等作业,让无人机实现电站“无人化”作业。
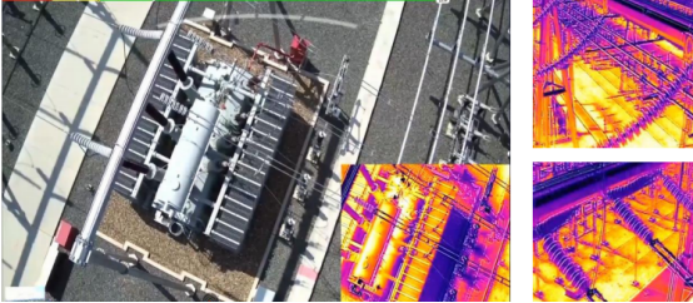
无人机自动化巡检系统建立的第一步就是基于激光点云数据采集建立作业地区三维模型,制定满足于后期航线规划的精度要求。杆塔基础、杆塔设备、附属设施、通道、导地线均清晰可见,廊道覆盖宽度满足日常巡检航线规划需要。
10kV-35kV(高塔设计除外)线路带宽要求在90-120米的点云采集适用高低空来回飞行的采集方法。低空飞行用于采集杆塔和导地线的点云,高空飞行用于采集通道带宽的点云,并且同一杆段用同一架次进行高低空飞行采集,以减少出现重影的可能性。
该方法的优点是简单快速容易撑握,缺点是杆塔过高时通道带宽的点云密度下降造成密度不够。
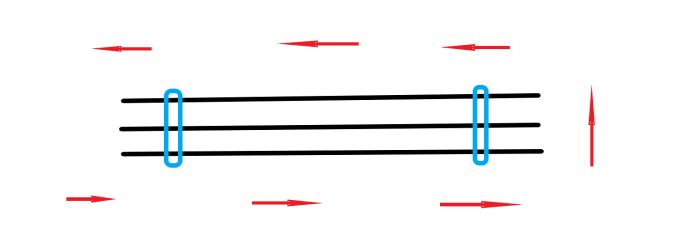
沿线路两侧扫一个来回的方式则解决了点云密度不高的问题。以1倍塔高为任务高度,飞行速度控制在5米每秒匀速前进,太快会引起点云密度低导地线断断续续,太慢或忽快忽慢都容易发生重影,沿线路的一侧前进另一侧返回,侧面偏移位置以线路的边线位于摇控器屏幕的九宫格中间格的边缘为参考。该方法的缺点是对飞手技能要求较高,需要对任务高度、速度、匀速把控很好,否则容易产生重影。
在专业飞手短缺的情况下,可采用沿线路中间扫一遍,再沿线路两边扫一个来回的方式进行采集。它的优点是点云密度好,对飞手技能要求不高,缺点是费时费电,效率不高。
控制点的采集数量要求一般在精度允许的前提下配电线路按每3公里左右采集一基塔,输电线路按每8-13基塔采集一基,平原地区可相对增大区间,地形落差较大需要在落差杆塔小号端塔及大号端塔分别采集。一条线路(含支线)不应少于3个控制点,少于3基杆塔的线路可1至2个控制点,3至6基杆塔的至少要有2-3个控制点。
正三角形排列单杆的控制点拍摄以垂直拍摄点为杆顶的正中间点,水平拍摄为杆顶的平面高度。
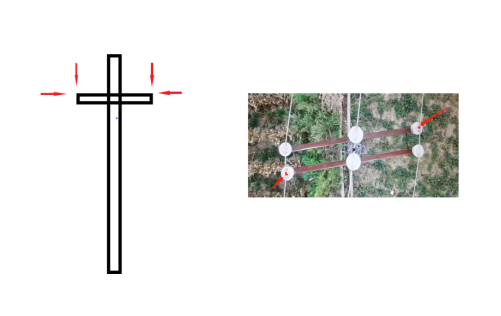
单杆双回杆塔、上字形杆塔(含上字形单杆、上字形轻型塔、上字形自立塔)及无地线横担的门形双杆控制点拍摄横担导线挂点两端,垂直点分别处于导线挂点金具垂直外侧,水平点分别处于横担水平面。
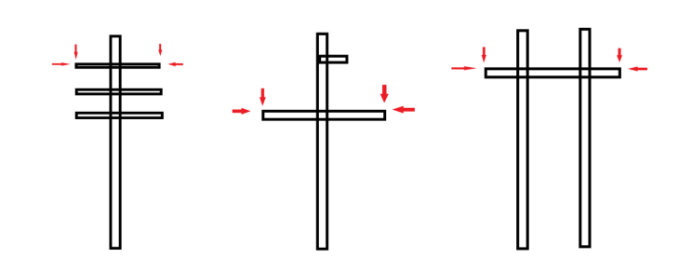
有地线横担的门形双杆控制点拍摄地线横担挂点两端,垂直点分别处于地线挂点金具垂直外侧,水平点分别处于横担水平面。
所有带双地线的自立塔控制点拍摄地线横担挂点两端,垂直点分别处于地线挂点金具垂直外侧,水平点分别处于地线挂点金具垂直上反方水平面。






